
- اطلاعات کلی
- مدرس : علیپور
- قسمت : تک قسمتی
- وضعیت محصول : غیر رایگان
- نوع آموزش : تصویری + کد متلب
- زبان : فارسی
- مدت زمان : 53 دقیقه
- حجم دوره: 84 مگابایت
- تاریخ : 31 می 2016
با سلام
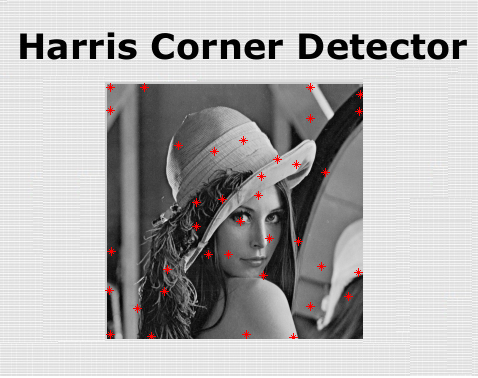
این پست که شامل قسمت سوم از مجموعه آموزش تناظریابی تصاویر می باشدکه به بیان آموزش پیاده سازی الگوریتم هریس Harris در متلب می پردازد.
یکی از گام های اولیه و اساسی در تناظریابی تصاویر، استخراج نقاطی از تصویر می باشد که متمایز بوده و قابلیت تشخیص را با توجه به اطلاعات اطرافشان دارند. به این نقاط، ویژگی، نقاط کلیدی (Key points) یا نقاط مورد علاقه می گویند. معمولا نقاط گوشه نقاط مناسبی برای تناظر می باشند. Harris corner detector یکی از الگوریتمهای شناسایی گوشه درتصویر میباشد. تغییرناپذیری نسبت به تغییرشدت، چرخش از ویژگیهای این الگوریتم میباشد.
در این پست پیاده سازی الگوریتم Harris در برنامه متلب (بصورت خط به خط) آموزش داده شده است. همچنین برای یادآوری، مفاهیم الگوریتم Harris به اختصار بیان گردید.
قسمت ۳:
۱- بیان مفاهیم الگوریتم هریس
۲- آموزش کد متلب الگوریتم هریس
————————————————————————————————————————————————————————————–
هدف از تهیه این مجموعه از فیلم های آموزشی، آشنایی با مباحث تناظریابی تصویر و پیاده سازی آنها در محیط متلب است. استخراج و تطابق ویژگیهای تصویر یک مبحث اساسی در پردازش تصویر و بینایی کامپیوتر می باشد که کاربردهای زیادی در object tracking, image registration, image retrieval, و ….. دارد. تناظریابی تصویر نیز یکی از موضوعات جذاب و پرکاربردی است که می تواند به عنوان یکی از موضوعات پایان نامه، مقاله و تحقیق در مقاطع تحصیلی دانشگاهی (ارشد و دکتری) بکارگیری شود.
مجموعه فیلم های تناظریابی تصویر در ۷ قسمت مجزا تهیه شده است که سعی شده است به الگوریتم های اساسی در این زمینه بپردازد:
- قسمت اول – آموزش الگوریتم Moravec
- قسمت دوم – آموزش الگوریتم هریس Harris
- قسمت سوم– آموزش پیاده سازی الگوریتم Harris در متلب
- قسمت چهارم –آموزش الگوریتم هریس لاپلاس Harris-Laplace
- قسمت پنجم – آموزش استخراج ویژگی الگوریتم سیفت SIFT
- قسمت ششم– آموزش پیاده سازی استخراج ویژگی SIFT در متلب
- قسمت هفتم– آموزش ایجاد توصیفگر الگوریتم SIFT
هر کدام از متدهای بالا به ترتیب برای حل مشکلات الگوریتم های قبل خود ارائه شده اند. لذا پیشنهاد بنده یادگیری هر ۷ قسمت با همدیگر و دنبال هم می باشد
امیدورام این مجموعه آموزشی بتواند کمکی در جهت یادگیری علاقه مندان در این زمینه کرده باشد.
با تشکر


سلام
من asp.net کار میکنم
در صورت امکان آموزشی در مورد کاربرد هوش مصنوعی در برنامه نویسی Asp.net اموزش بدید
تا بتونیم از این علم هم در برنامه نویسی بهره ببریم
میتونید با یک استاد دیگه که Asp.net کار میکنه هماهنگ بشید و یک اموزش دو استاده بسازید
و یا اگه خودتون بلدید چنین بدید خیلی خوب میشه